.2.1 Coordinate systems
If not otherwise specified, the base coordinate system is right handed. Its origin is in the midship plane on the base line and at the aft perpendicular (AP). The positive X-Axis is pointing forward (to the bow) and the positive Z-Axis is pointing up. Thus, the positive Y-Axis is pointing to port side.
.2.2 Draft, heave and sinkage
Initial static drafts are specified positive, even though the ship is moved in negative z-direction from the base to the computational coordinate system. Dynamic heave motions however are given with respect to the computational coordinate system, i.e. a negative heave means a sinkage of the ship.
.2.3 Trim and trim angle
A trim in [m] is defined positive for a bow up trim and negative for a bow down trim. This is independent of the coordinate system and derived by:
TRIM = TA - TF
A trim angle is defined w.r.t. the coordinate system. I.e. in the standard base coordinate system a positive trim angle denotes a bow down trim.
.2.4 Hydrostatic and hydrodynamic reference length
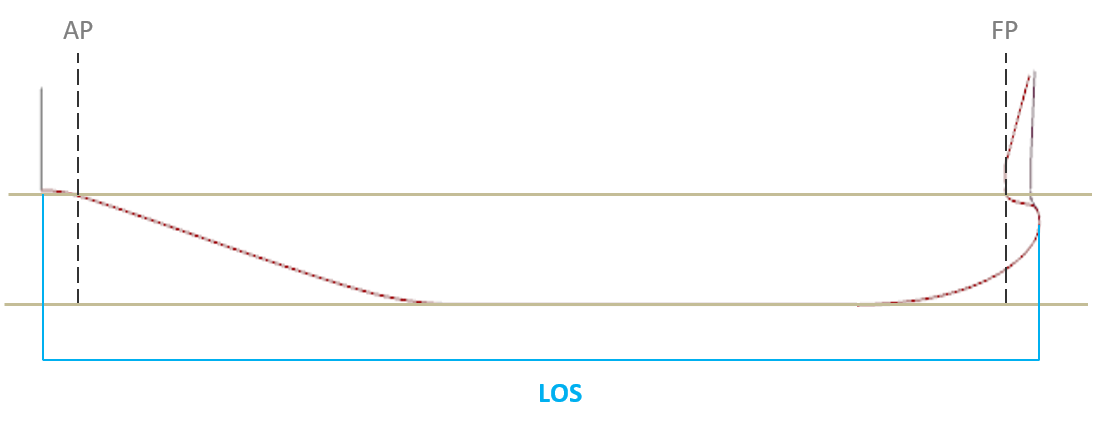
With modern slender and (near) vertical stem designs, gently inclined buttock lines near the transom and a freely selectable aft perpendicular (AP), neither LPP nor LWL provide an unambiguous hydrodynamic and hydrostatic reference length.
To ensure a consistent and unambiguous comparison of different hull forms the length of submerged hull (LOS) will be used here for the definition of:
CB, LCB (%LOS from LOS/2), L/DISPVOL³, Re, etc
LOS is defined as the distance from the most forward submerged point of the hull to the transom: